BB50
Ball and Beam
|
 |
The
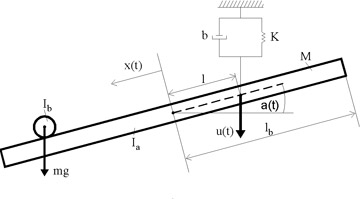
nonlinear plant is represented by a ball laying on a beam with
an adjustable angle. The ball can roll upon the beam within a
distance of 1m. By a toothed belt, a toothed wheel and a clutch
mounted on the shaft of a DC-motor the beam can be driven such
that the ball is stabilized at a preassigned position. The stabilization
of the ball is accomplished by a digital controller. Based on
measurements, the controller generates a suitable signal, which
controls the DC-motor by an electronic servo amplifier. The measurements
are the angle of the beam obtained by an incremental encoder and
the ball position obtained by a CCD-camera. The system is ready
to operate after connecting to the electronic actuator. All the
moving parts are covered by transparent plexiglass. The Option 50-06 contains a colour monitor suitable for display of the camera image and for service. The monitor will be delivered with a power supply and a connection cable to the actuator. Technical
data are subject to change (Date 9-March-2024) |