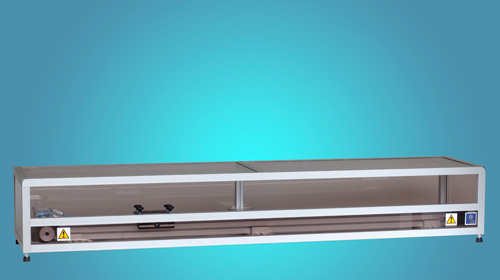
PC60
Position Control
The
laboratory experimental setup "Position Control" contains
the technical realization of a position control plant with an actuator. The laboratory setup
can be used as a basis for the plants "Inverted Pendulum", "Tandem
Pendulum" and "Loading Bridge". |
|