PC60
Position Control
|
 |
|
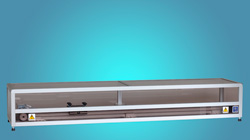
The basic system includes an actuator as well as the mechanical setup (PC60). By a threephase synchronous drive, a toothed wheel, a toothed belt and a clutch, the moving base can be driven along a guiding bar over a length of approximately 1.5m such that its position is controlled at a preassigned setpoint. The position control is accomplished by a digital controller. Based on a sensor signal, the controller generates a suitable signal which controls the integrated electronics of the synchronous drive. The measurement of the cart position obtained by an incremental encoder.
|